

Products & Services
製品・サービス
動作中のロボットを止めずに
JOBの作成や段取り替えができる
*2:ロボットの自動運転動作が停止している状態。自動運転動作中は“オンライン”

システム概要
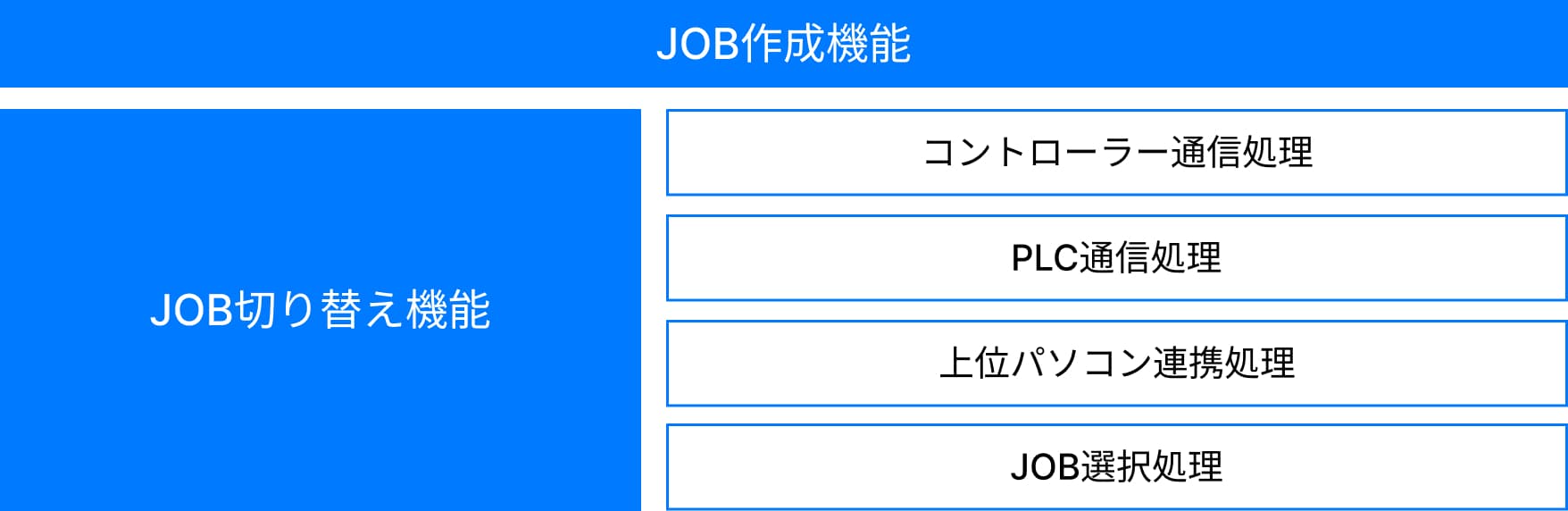
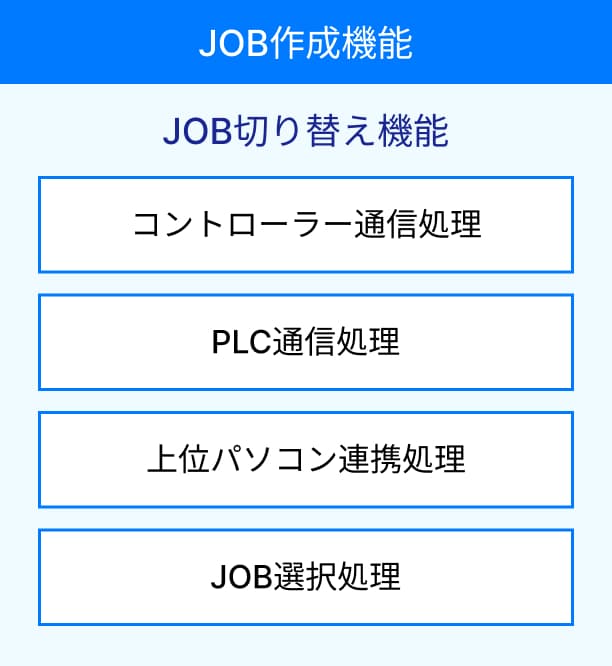
本ツールは、主にJOB作成機能およびJOB切り替えの2つの機能で構成されています。
-
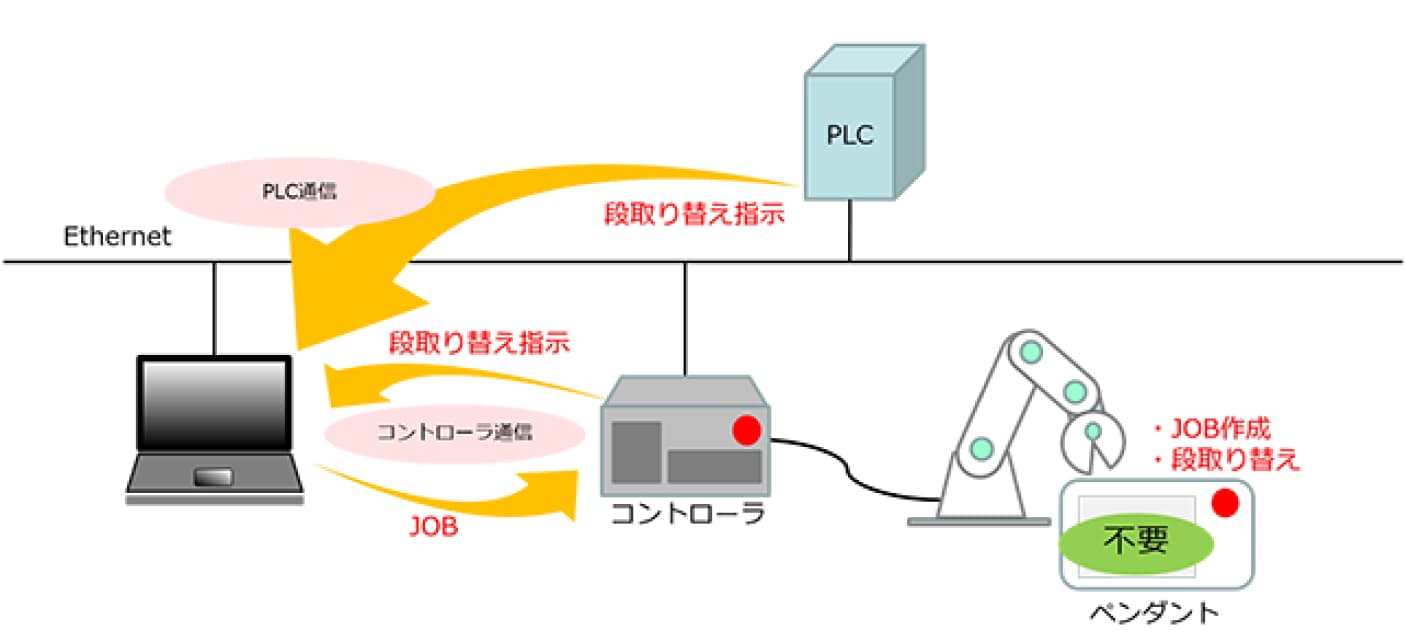
システム構成イメージ
-
JOB作成機能 … パソコンでのJOB作成を支援する機能
お客様の用途に合わせて独自のJOB作成画面を構築します。この画面を使って作成したJOBはロボットコントローラ(以下、コントローラ)に送信することが出来ます。また作成したJOBの動作をメーカーより提供されるロボットシミュレータ(以下、シミュレータ)上で確認することも出来ます。
-
JOB切り替え機能 … 必要なJOBを必要なタイミングでコントローラに送信する機能
同一の生産ラインで仕様・形状の異なる複数のワークを取り扱う場合、それぞれのワークの特性にマッチした専用のJOBが必要です。パソコンにJOBを切り替える機能を持たせることにより、ロボットをオフライン状態にしたり、オペレータがJOBの切り替え操作をしたりすることなく、自動的にJOBを切り替えることが出来ます。
-
JOB切り替えタイミング
PLCもしくはコントローラからの指示に基づきます。指示を受けたタイミングにて、あらかじめPC上に準備された複数のJOBの中から適切なJOBを選択すると同時に、当該JOBをコントローラに送信します。PLCからの指示はメーカーから提供される通信用ソフトウェアを、コントローラからの指示はロボット言語による命令を、コントローラへのJOB送信にはFTPを使用します。
期待できる効果
-
早期立ち上げ
ペンダントよりも操作性に優れたユーザーインタフェーズにより、スピーディーにJOBを作成することが出来ます。また作成したJOBの動作をシミュレータ上で確認することができるため、ロボットの設置完了後、直ちに動作させることも可能になります。
-
生産性向上
ティーチング、JOB作成・修正、およびJOBの切り替え(段取り替え)をパソコンのみで行なうため、生産ラインおよびロボットを停止する頻度を最小限度にすることが可能です。
適用システム
-
本システムは産業用ロボットを活用した様々な生産ラインで稼動しています。
- パレタイジングシステム
- 自動車シート用原料注入システム
- グルービングシステム
- シーリングシステム
- お電話でのお問い合せ 092-686-7373
- メールでのお問い合せ sales@scsk-kyushu.co.jp
担当:小田原諭、上野一平まで