

Products & Services
製品・サービス
ワークの形状や位置に合わせて
ロボットの位置を補正する
システム概要
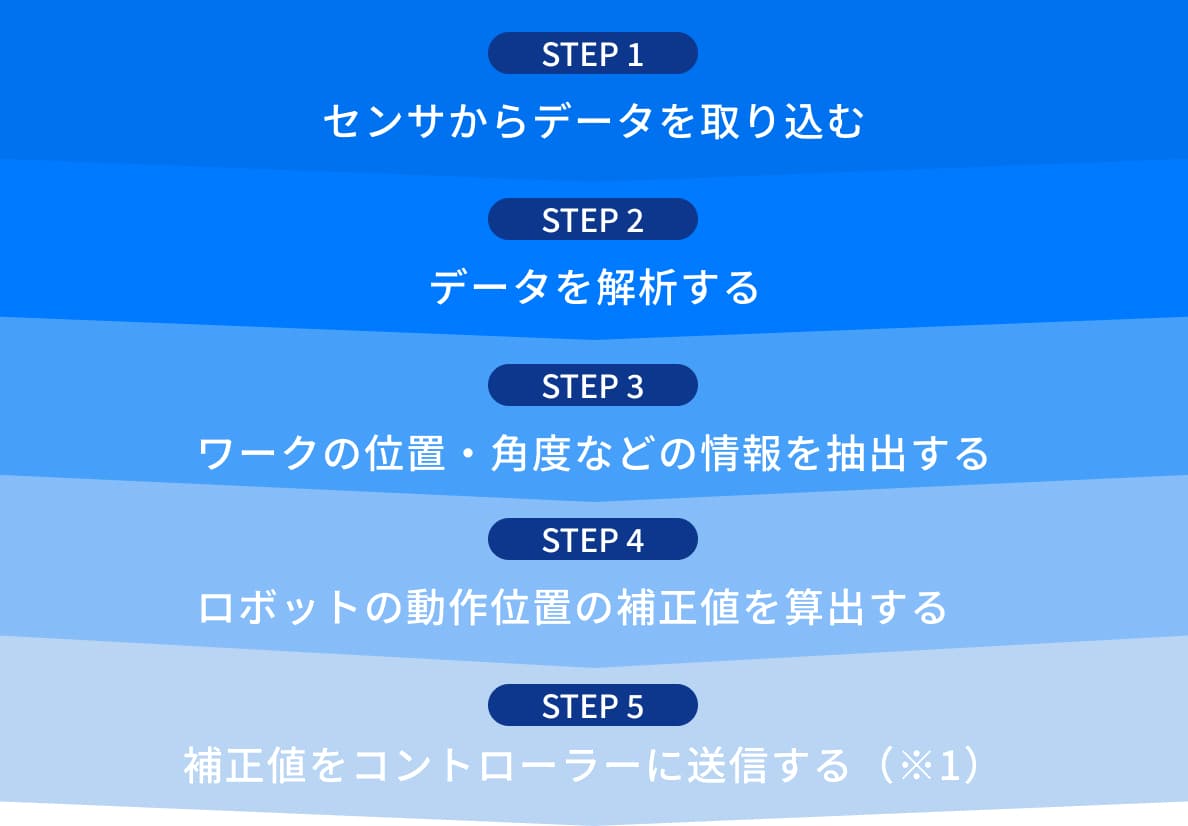
センサから受信したデータを元にロボットの動作位置の補正値(位置・確度)を算出するためのカスタムアプリケーションです。センサがロボットコントローラ(以下、コントローラ)との間に通信I/Fを持っているか否かにより、アプリケーションの処理の内容、ハードウェア構成が異なります。
-
処理の流れ
-
センサがコントローラとの接続I/Fを
持っている場合(パソコンが不要)メーカーより提供されるアプリケーション開発環境を活用し、センサとの通信プログラムおよびセンサから受診したデータを元にロボットの動作位置の補正値を算出するためのアプリケーションを構築します。このアプリケーションはコントローラ上で動作するため、パソコンを用意する必要はありません(*2)。またセンサとの通信プログラムのメンテナンス性が高いため、センサの変更などによる通信I/Fの変更にも柔軟に対応可能です。
*2:アプリケーションの開発作業には必要となります -
センサがコントローラとの
接続I/Fを持っていない場合(パソコンが必要)このケースではセンサはEthernetなどの汎用ネットワークで接続されます。パソコン上に構築したアプリケーションがセンサから受信したデータを元にロボットの動作位置の補正値を算出し、その補正値をコントローラに送信します。
ビジョンセンサとの連携例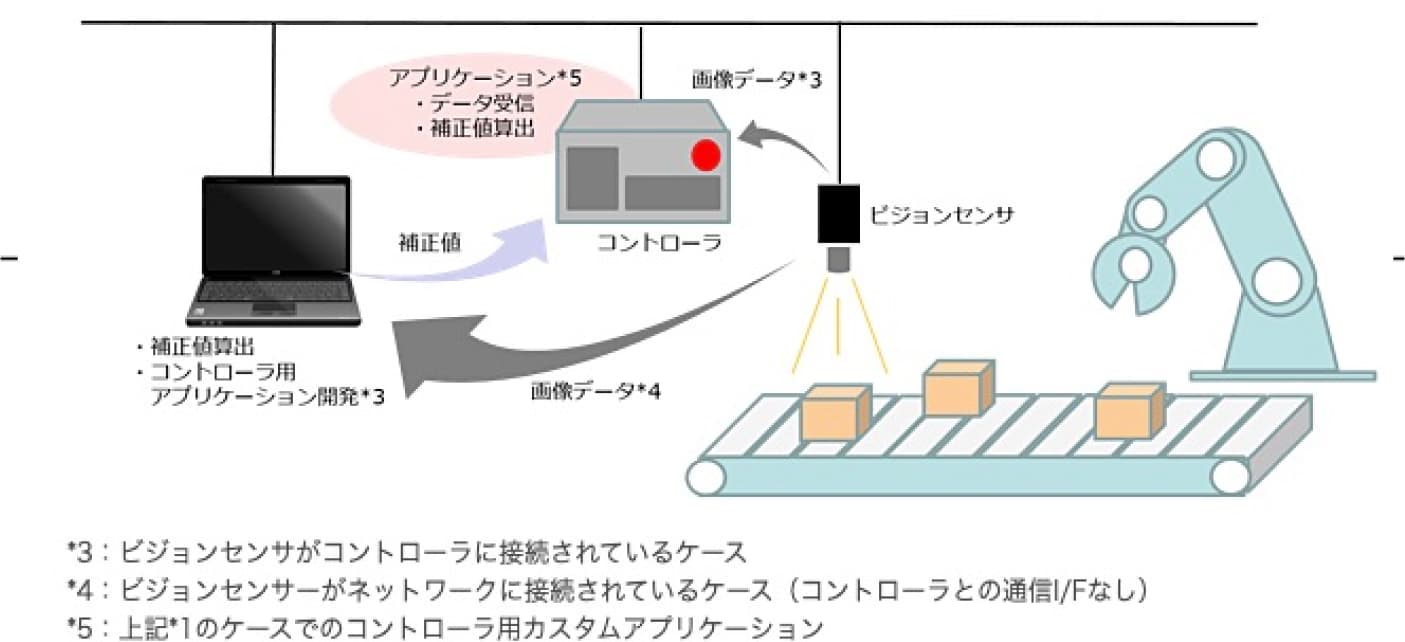
期待できる効果
-
品質・生産性向上
ロボットの動作位置を補正することで、より精度の高い動作を可能にします。これにより、製品の品質を高める、想定外のライン停止を回避するという効果に期待できます。
-
柔軟性向上
アプリケーションでセンサとの通信処理を行うため、将来センサが変更になった場合でも、柔軟に(簡単な修正で)対応することができます。
適用システム
-
本システムは産業用ロボットを活用した様々な生産ラインで稼動しています。
- ピッキングシステム(*6)
- 検査システム(*7)
- ・・・ など多数
*6:必要な物品を集める作業にロボットを活用するシステムです。たとえば倉庫では出荷する商品を棚から取り出したり、工場ではベルトコンベアで流れてくる商品を箱詰めしたり、あるいは箱の中にある商品をベルトコンベアに載せたりする作業がありますが、これを人手ではなくロボットにて行います。対象となる物品の位置や形状が一定ではない場合、ロボットは正確に物品を把持(掴む)出来ないため各種センサから取得した情報でロボットの動作を補正する必要があります。
*7:製品や商品の品質を維持・保証するために行う外観検査にロボットを活用するシステムです。商品・製品および部品等の表面に付着した異物や汚れ、傷、バリ、欠け、変形といった外観上の欠陥を確認したうえで良否を判定する作業を人手(目視)ではなく、ロボットにて行います。ロボット自体は人間の五感に相当する機能・器官を持っていないため、それを代替するものとして各種センサを活用します。
- お電話でのお問い合せ 092-686-7373
- メールでのお問い合せ sales@scsk-kyushu.co.jp
担当:小田原諭、上野一平まで